|
|

|

|
| e-Pub |
Section: New Results
Learning embodied representations and robotics
Roboticists and Reporters
Participants : Celine Pieters, Emmanuelle Danblon, Jean-Paul Laumond.
This paper reports on an experiment organized at the Cité des Sciences et de l’Industrie (CSI) of Paris in order to assess the importance of language in the representation and the integration of robots into the human culture. The experiment gathered specialized reporters and experts in robotics around a practical exercise of rhetoric. The objective of this work is to show that rhetoric is not a matter of communication, but a technique that allows to better understand the way roboticists understand their own discipline.
Robots
Participants : Jean-Paul Laumond, Denis Vidal.
What is a robot? How does it work? How is research progressing, what are the challenges and the economic and social questions posed by robotics in the twenty-first century? Today, as robots are becoming increasingly present in our professional, public and private lives, it is vital to understand their technological capabilities. We must more fully comprehend how they can help us and master their uses. Robots continue to fascinate us but our idea of them, stemming from literature and cinema, is often a purely imaginary one. This illustrated book accompanies the Robots exhibition at the Cité des sciences et de l’industrie. Figure 17 presents the front page of the exhibition.
|
Learning to Augment Synthetic Images for Sim2Real Policy Transfer
Participants : Alexander Pashevich, Robin Strudel, Igor Kalevatykh, Ivan Laptev, Cordelia Schmid.
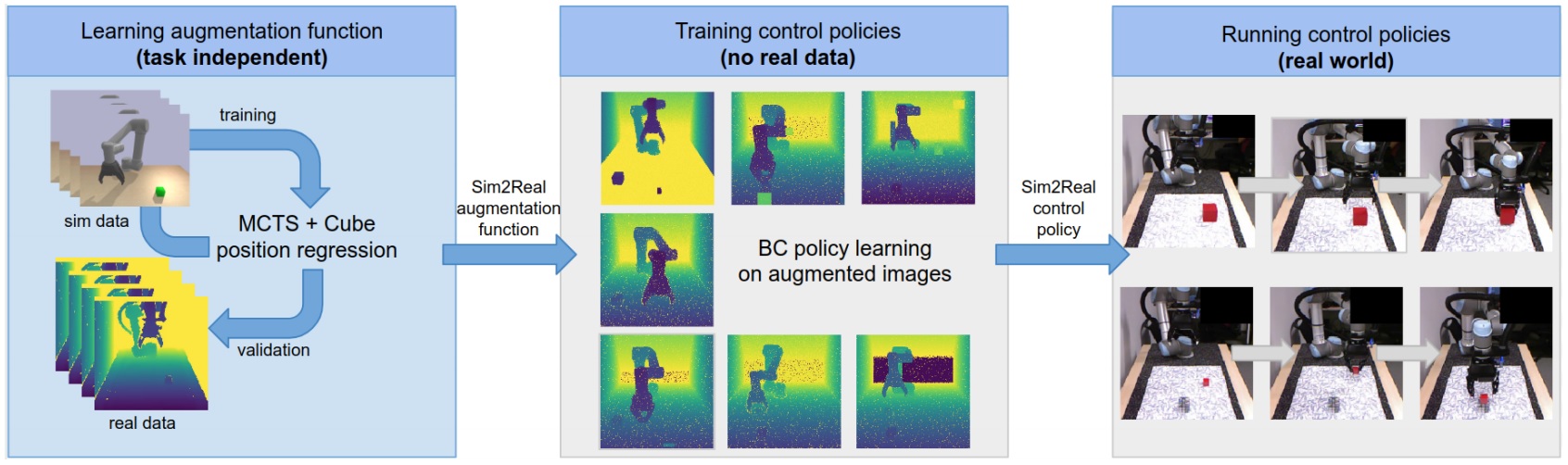
Vision and learning have made significant progress that could improve robotics policies for complex tasks and environments. Learning deep neural networks for image understanding, however, requires large amounts of domain-specific visual data. While collecting such data from real robots is possible, such an approach limits the scalability as learning policies typically requires thousands of trials. In this paper [18], we attempt to learn manipulation policies in simulated environments. Simulators enable scalability and provide access to the underlying world state during training. Policies learned in simulators, however, do not transfer well to real scenes given the domain gap between real and synthetic data. We follow recent work on domain randomization and augment synthetic images with sequences of random transformations. Our main contribution is to optimize the augmentation strategy for sim2real transfer and to enable domain-independent policy learning. We design an efficient search for depth image augmentations using object localization as a proxy task. Given the resulting sequence of random transformations, we use it to augment synthetic depth images during policy learning. Our augmentation strategy is policy-independent and enables policy learning with no real images. We demonstrate our approach to significantly improve accuracy on three manipulation tasks evaluated on a real robot. Figure 18 presents an illustration of the approach.
|
Learning to combine primitive skills: A step towards versatile robotic manipulation
Participants : Robin Strudel, Alexander Pashevich, Igor Kalevatykh, Ivan Laptev, Josef Sivic, Cordelia Schmid.
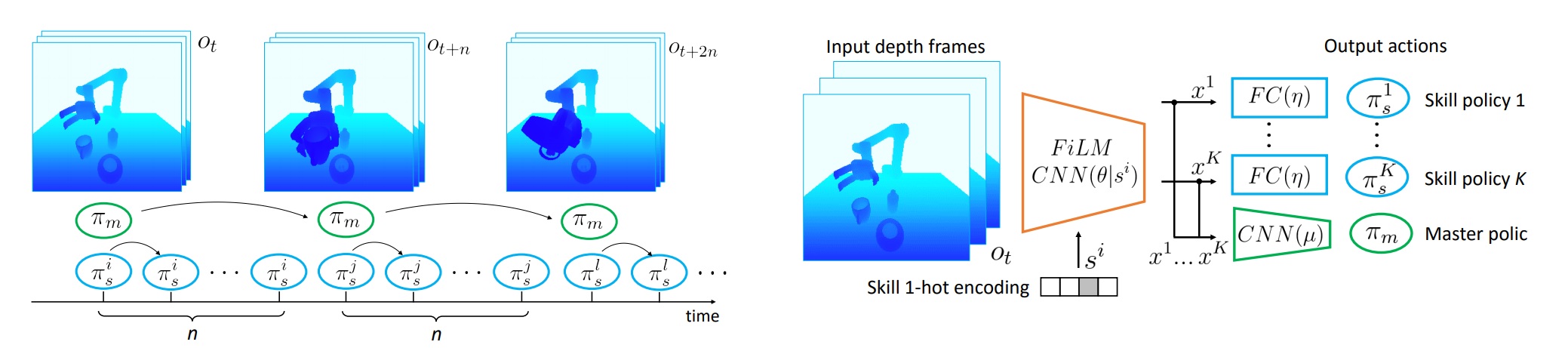
Manipulation tasks such as preparing a meal or assembling furniture remain highly challenging for robotics and vision. Traditional task and motion planning (TAMP) methods can solve complex tasks but require full state observability and are not adapted to dynamic scene changes. Recent learning methods can operate directly on visual inputs but typically require many demonstrations and/or task-specific reward engineering. In this paper [20], we aim to overcome previous limitations and propose a reinforcement learning (RL) approach to task planning that learns to combine primitive skills. First, compared to previous learning methods, our approach requires neither intermediate rewards nor complete task demonstrations during training. Second, we demonstrate the versatility of our vision-based task planning in challenging settings with temporary occlusions and dynamic scene changes. Third, we propose an efficient training of basic skills from few synthetic demonstrations by exploring recent CNN architectures and data augmentation. Notably, while all of our policies are learned on visual inputs in simulated environments, we demonstrate the successful transfer and high success rates when applying such policies to manipulation tasks on a real UR5 robotic arm. Figure 19 presents an illustration of the approach.
|
Monte-Carlo Tree Search for Efficient Visually Guided Rearrangement Planning
Participants : Sergey Zagoruyko, Yann Labbé, Igor Kalevatykh, Ivan Laptev, Justin Carpentier, Mathieu Aubry, Josef Sivic.
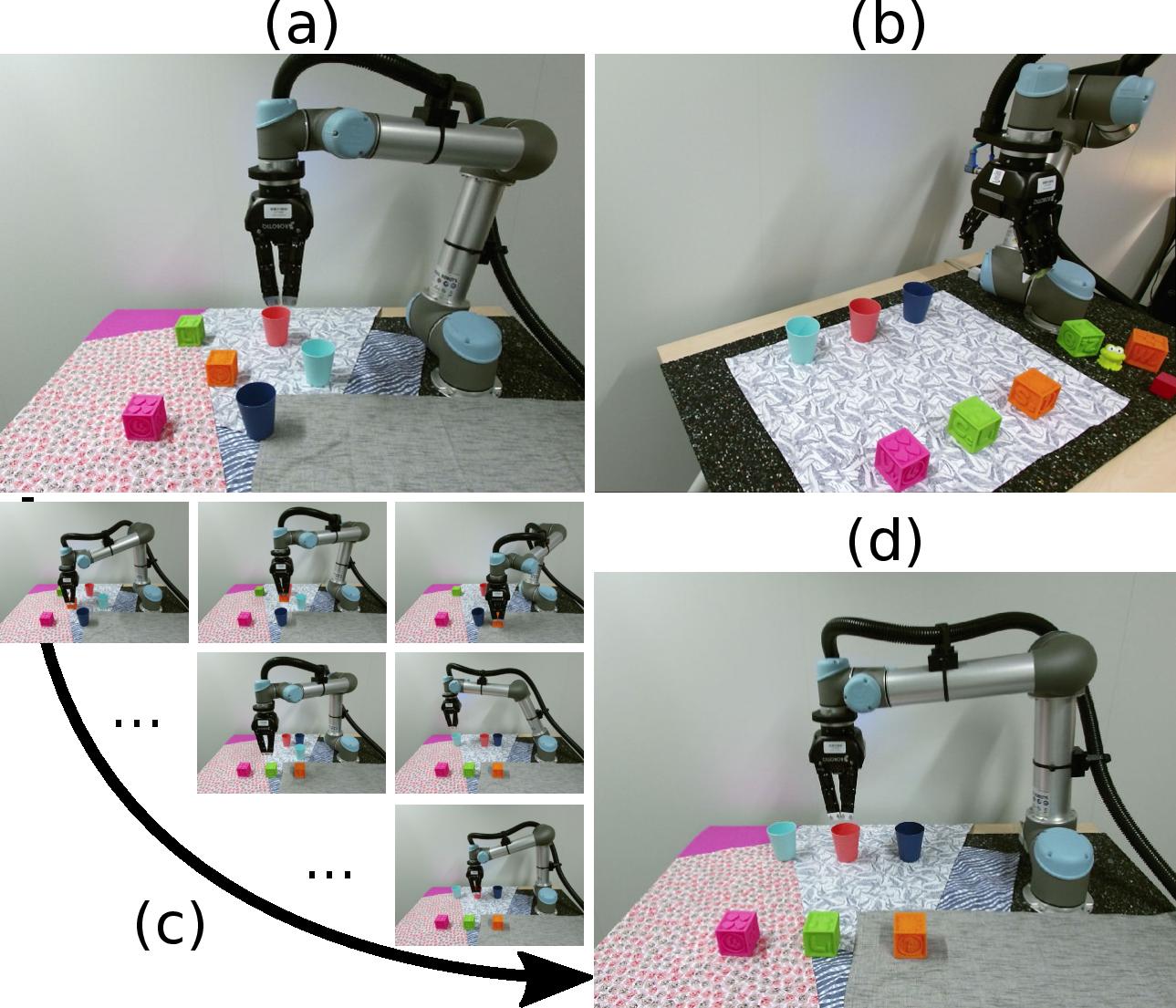
We address the problem of visually guided rearrangement planning with many movable objects, i.e., finding a sequence of actions to move a set of objects from an initial arrangement to a desired one, while relying on visual inputs coming from RGB camera. To do so, we introduce a complete pipeline relying on two key contributions. First, we introduce an efficient and scalable rearrangement planning method, based on a Monte-Carlo Tree Search exploration strategy. We demonstrate that because of its good trade-off between exploration and exploitation our method (i) scales well with the number of objects while (ii) finding solutions which require a smaller number of moves compared to the other state-of-the-art approaches. Note that on the contrary to many approaches, we do not require any buffer space to be available. Second, to precisely localize movable objects in the scene, we develop an integrated approach for robust multi-object workspace state estimation from a single uncalibrated RGB camera using a deep neural network trained only with synthetic data. We validate our multi-object visually guided manipulation pipeline with several experiments on a real UR-5 robotic arm by solving various rearrangement planning instances, requiring only 60 ms to compute the complete plan to rearrange 25 objects. In addition, we show that our system is insensitive to camera movements and can successfully recover from external perturbation. Figure 20 shows an example of the problems we consider. This work is under-review and an early pre-print is available [37].
|
Estimating the Center of Mass and the Angular Momentum Derivative for Legged Locomotion — A recursive approach
Participants : François Bailly, Justin Carpentier, Mehdi Benallegue, Bruno Watier, Philippe Soueres.
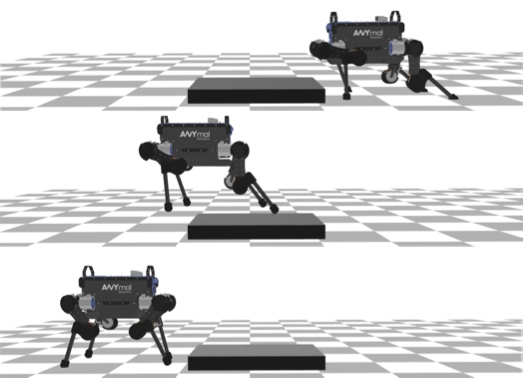
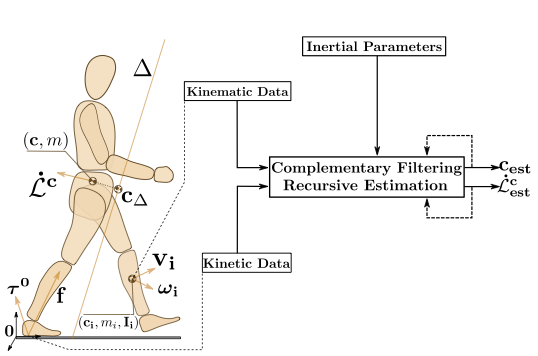
Estimating the center of mass position and the angular momentum derivative of legged systems is essential for both controlling legged robots and analyzing human motion. In this paper[4], a novel recursive approach to concurrently and accurately estimate these two quantities together is introduced. The proposed method employs kinetic and kinematic measurements from classic sensors available in robotics and biomechanics, to effectively exploits the accuracy of each measurement in the spectral domain. The soundness of the proposed approach is first validated on a simulated humanoid robot, where ground truth data is available, against an Extend Kalman Filter. The results demonstrate that the proposed method reduces the estimation error on the center of mass position with regard to kinematic estimation alone, whereas at the same time, it provides an accurate estimation of the derivative of angular momentum. Finally, the effectiveness of the proposed method is illustrated on real measurements, obtained from walking experiments with the HRP-2 humanoid robot. Figure 21 presents an illustration of the approach.
|
Dynamics Consensus between Centroidal and Whole-Body Models for Locomotion of Legged Robots
Participants : Rohan Budhiraja, Justin Carpentier, Nicolas Mansard.
It is nowadays well-established that locomotion can be written as a large and complex optimal control problem. Yet, current knowledge in numerical solver fails to directly solve it. A common approach is to cut the dimensionality by relying on reduced models (inverted pendulum, capture points, centroidal). However it is difficult both to account for whole-body constraints at the reduced level and also to define what is an acceptable trade-off at the whole-body level between tracking the reduced solution or searching for a new one. The main contribution of this paper [9] is to introduce a rigorous mathematical framework based on the Alternating Direction Method of Multipliers, to enforce the consensus between the centroidal state dynamics at reduced and whole-body level. We propose an exact splitting of the whole-body optimal control problem between the centroidal dynamics (under-actuation) and the manipulator dynamics (full actuation), corresponding to a rearrangement of the equations already stated in previous works. We then describe with details how alternating descent is a good solution to implement an effective locomotion solver. We validate this approach in simulation with walking experiments on the HRP-2 robot. Figure 22 presents a resulting motion of the proposed approach.

The Pinocchio C++ library – A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives
Participants : Justin Carpentier, Guilhem Saurel, Gabriele Buondonno, Joseph Mirabel, Florent Lamiraux, Olivier Stasse, Nicolas Mansard.
In this paper [10], we introduce Pinocchio, an open-source software framework that implements rigid body dynamics algorithms and their analytical derivatives. Pinocchio does not only include standard algorithms employed in robotics (e.g., forward and inverse dynamics) but provides additional features essential for the control, the planning and the simulation of robots. In this paper, we describe these features and detail the programming patterns and design which make Pinocchio efficient. We evaluate the performances against RBDL, another framework with broad dissemination inside the robotics community. We also demonstrate how the source code generation embedded in Pinocchio outperforms other approaches of state of the art. Figure 23 presents the logo of Pinocchio.

Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control
Participants : Carlos Mastalli, Rohan Budhiraja, Wolfgang Merkt, Guilhem Saurel, Bilal Hammoud, Maximilien Naveau, Justin Carpentier, Sethu Vijayakumar, Nicolas Mansard.
In this paper [31], we introduce Crocoddyl (Contact RObot COntrol by Differential DYnamic Library), an open-source framework tailored for efficient multi-contact optimal control. Crocoddyl efficiently computes the state trajectory and the control policy for a given predefined sequence of contacts. Its efficiency is due to the use of sparse analytical derivatives, exploitation of the problem structure, and data sharing. It employs differential geometry to properly describe the state of any geometrical system, e.g. floating-base systems. We have unified dynamics, costs, and constraints into a single concept-action-for greater efficiency and easy prototyping. Additionally, we propose a novel multiple-shooting method called Feasibility-prone Differential Dynamic Programming (FDDP). Our novel method shows a greater globalization strategy compared to classical Differential Dynamic Programming (DDP) algorithms, and it has similar numerical behavior to state-of-the-art multiple-shooting methods. However, our method does not increase the computational complexity typically encountered by adding extra variables to describe the gaps in the dynamics. Concretely, we propose two modifications to the classical DDP algorithm. First, the backward pass accepts infeasible state-control trajectories. Second, the rollout keeps the gaps open during the early "exploratory" iterations (as expected in multiple-shooting methods). We showcase the performance of our framework using different tasks. With our method, we can compute highly-dynamic maneuvers for legged robots (e.g. jumping, front-flip) in the order of milliseconds. Figure 24 presents a resulting motion of the proposed approach.